




El desarrollo de automatismos modernos, controlados a partir de circuitos lógicos, microprocesadoras, microcomputadoras y microcontroladores con gran precisión, involucra el uso de motores paso a paso. Sin embargo, la disponibilidad de datas e informaciones que faciliten la elaboración de los proyectos es un obstáculo hasta incluso mayor que la obtención de los propios motores y de los elementos mecánicos asociados. En este artículo mostramos en diversos circuitos prácticos cómo controlar un motor paso a paso basándose en un único integrado proyectado especialmente para esta finalidad.
Este articulo es de 1988.
La precisión en el movimiento de mecanismos como las lectoras de discos rígidos o disquetes en microcomputadores, de cabezas de impresión en impresoras y de brazos de robots usados en aplicaciones industriales, experimentales y hasta de investigación depende fundamentalmente de un tipo de motor especial que es el motor paso a paso.
Sin embargo, el motor paso a paso solo, no nos brinda dispositivos precisos, ya que necesitamos una serie de elementos de control externo que involucran la electrónica y la mecatrónica.
De esta forma, asociados al desarrollo de los motores paso a paso. surgieron diversos circuitos integrados especiales justamente proyectados para controlar estos nuevos elementos mecánicos, íntimamente ligados a la nueva ciencia que se desarrolla y que es la "robótica" (ramo de la mecatrónica).
Uno de los integrados más versátiles para el control de estos motores paso a paso es el SAA1027 que puede servir tanto para aplicaciones prácticas importantes hasta el estudio de aplicaciones y desarrollos en escuelas o laboratorios de robótica.
El SAA1027 es proyectado para controlar motores paso a paso de 4 fases y puede servir para las siguientes aplicaciones:
- Brazos o robots completos
- Impresoras
- Automatismos mecánicos diversos
- Control remoto
- Máquinas de escribir electrónicas
- Plotters (graficadores)
En este artículo daremos los circuitos básicos que permiten la utilización de este integrado en el control de diversos tipos de motores paso a paso de 4 fases, posibilitando así que los lectores puedan pensar en la elaboración de su propio proyecto de robot, impresora, control remoto, o o que quieran.
Los motores paso a paso
Los motores paso a paso. consisten en elementos especiales de la familia de los motores de corriente continua, siendo dotados de diversos bobinados, como muestra la figura 1.

Para girar el eje de este tipo de motor aplicamos pulsos. Cada pulso hace que el eje se desplace un angulo preciso que varia normalmente entre 1,8 y 7,5 grados.
Con una secuencia apropiada de pulsos podemos hacer que el eje gire en cualquier dirección y además, se ubique en lugares bien precisos. múltiplos del valor del paso.
La figura muestra un motor de 4 fases, observándose que el rotor formado por una especie de rueda dentada se ubica siempre en relación a la bobina que es energizada. Este tipo de motor se denomina de "reluctancia variable".
Vea que en este motor, tenemos intervalos de 15 grados entre las bobinas de fase, lo que significa que su paso tiene este valor. Se obtienen pasos menores mediante la utilización de más bobinas.
Para calcular el valor del paso del motor aplicamos la siguiente fórmula:
x= 360/(f x n)
Donde:
x es el valor del paso en grados:
f es el número de fases:
n es el número de dientes del rotor.
Una variación muy usada de motor paso a paso es el llamado tipo híbrido que tiene el mismo principio del motor que vimos (reluctancia variable), difiriendo solamente en la construcción interna que lleva ímanes permanentes para la producción de un campo magnético interno.
El integrado SAA1027
El circuito integrado SAA1027 consiste en un driver para motores paso a paso de 4 fases con dos estatores. El circuito fundamentalmente consiste en un contador direccional de 4 estados y un convertidor de código capaz de excitar cuatro salidas en la secuencia necesaria al funcionamiento de un motor paso a paso.
El SAA1027 puede excitar directamente motores paso a paso con tensiones de trabajo de 9,5 a 18 volt y corrientes de hasta 500mA.
Para corrientes mayores que 500mA brindamos algunos sugerencias de etapas adicionales que se pueden usar en los proyectos. Observe que las salidas del integrado van al nivel bajo para la excitación de la bobina correspondiente.
Los únicos componentes externos son elementos cuyos valores dependen del tipo de motor usado.
Así, para el circuito de alimentación tenemos una división en dos sectores, siendo uno de corriente elevada para el motor y el otro de baja corriente con filtrado adicional dada por R1 y C1.
El resistor Rx conectado al circuito de alta corriente determina la máxima corriente que se aplicará al motor paso a paso, y su valor está dado por la fórmula:
Rx = (4 x V)/(I – 60)
Donde:
Rx es el valor del resistor en ohm
V es la tensión de alimentación en volt
I es la corriente deseada en cada fase del motor en ampere.
Los terminales de control funcionan de la siguiente manera:
La entrada RESET es mantenida en el nivel alto, para que a cada transición positiva del terminal COUNT tengamos una alteración del estado en las salidas del integrado. Esta secuencia dependerá del nivel aplicado a la entrada MODE que determina el sentido de la rotación del motor.
Tenemos entonces dos secuencias posibles que corresponden a la rotación del motor en el sentido directo o en el sentido inverso, lo que aparece en la Tabla I.
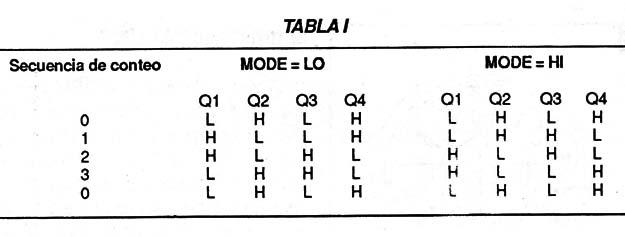
Si llevamos la salida RESET al nivel LO el contador llevará las salidas ala posición correspondiente al 0 de la secuencia de conteo.
EI circuito integrado es del tipo ”open collector" (colector abierto) en las salidas.
Para evitar problemas de sobretensión en las mismas, cuando se produce la conmutación de una carga inductiva como la representada por los bobinados del motor, se usan diodos de protección. En el circuito equivalente observamos la colocación de estos diodos. las principales características de este integrado son:
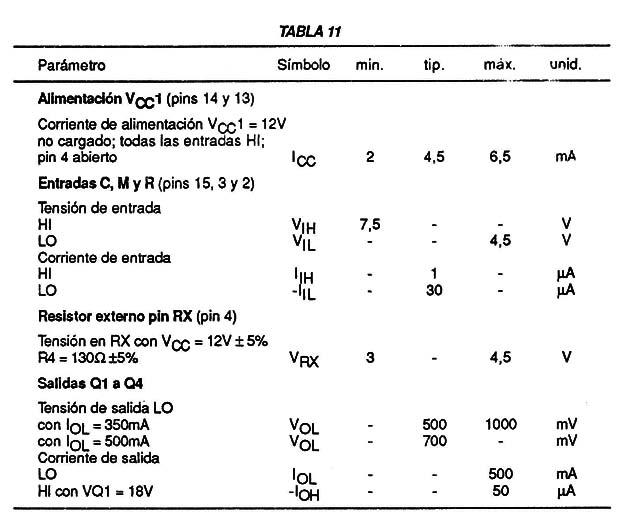
- Banda de tensiones de alimentación (VCC) : 9,5 a 15V
- Corriente sin carga (ICC tip) : 4,5mA
- Tensiones de entrada (en todas las entradas) : HI (VIH min) : 7,5V y LO (VIL máx) : 4,5V
- Corriente de entrada (IOL máx) : 30uA
- Corriente de salida (IOL máx) : 500mA

En la tabla II tenemos las características para una tensión de alimentación de 9,5 a 18V, con VEE : 0V, y una banda de temperatura de operación de -20 a +70ºC.
Aplicaciones
a) Control manual y automático
EI circuito de la figura 3 es ideal para aplicaciones didácticas y para el desarrollo de proyectos de robótica, pues permite el control de un motor de paso manualmente o bien de modo automático pero con acción bastante lenta lo que permite visualizar cada movimiento en forma precisa.

En el accionamiento manual podemos verificar paso a paso las posiciones de un brazo de robot, por ejemplo, simulando su funcionamiento. Este mismo accionamiento manual sirve para una demostración con fines didácticos, en una clase sobre motores paso a paso en un curso de robótica, facilitando la asimilación de los principios involucrados por los alumnos.
El funcionamiento de este circuito es el siguiente:
La llave S4 selecciona el modo de funcionamiento del motor (MODE), o sea, si se moverá en sentido horario o antihorario. Con la llave conectando la entrada al nivel alto (HI) el motor gira en el sentido horario, y en la posición en que el nivel lógico es bajo (LO) el motor girará en el sentido antihorario.
La llave S2 selecciona si el accionamiento es manual o automático.
En el accionamiento manual tenemos un interruptor de presión que produce los pulsos capaces de efectuar el avance del motor.
El capacitor C5 en conjunto con R4 garantiza la eliminación de los repiques, pero para una seguridad mayor en la producción de pulsos únicos también se puede usar el circuito de la figura abajo.

A cada pulso del interruptor de presión el motor avanza (o retrocede) un paso de forma precisa.
En la posición de accionamiento automático colocamos en el circuito un oscilador que produce un tren de pulsos cuya velocidad puede ser ajustada por el potenciômetro P1.
La frecuencia máxima de operación del accionamiento automático está alrededor de 60Hz lo que corresponde para un motor paso a paso de 7 ,5º, lo que equivale a 75rpm de velocidad máxima.
Está claro que, para velocidades mínimas no hay limite, ya que con un capacitor de 1000uF y potenciômetro de 1M podemos obtener pulsos en intervalos de hasta mas de media hora, lo que nos da una vuelta cada 24 horas aproximadamente!
Dependiendo del tipo de motor usado pueden emplearse frecuencias más elevadas de accionamiento, pero esto depende dela aplicación que se tiene en mente.
Otro circuito de accionamiento automático emplea un oscilador CMOS con el 4093 que aparece en la figura 5.

Este circuito puede ser controlado externamente, por ejemplo con el disparo a partir de sensores o incluso de otros circuitos digitales. La frecuencia también se ajusta en el potenciómentro y su banda es también como la obtenida por el 555.
b) Control óptico
Una aplicación experimental que también puede servir de base para un proyecto de robótica aparece en la figura 6 donde tenemos dos tipos de accionamiento por control remoto.

la incidencia de luz en el LDR1 hace que se inicie la producción del tren de pulsos. Esta producción tiene 1a duración dada por el monoestable con el 555 y puede variar entre algunos segundos hasta más de media hora.
Por otro lado, la incidencia de luz en el LDR2 hace que tengamos la inversión del sentido de rotación. Con 1a utilización de un monoestable como el 555 mostrado en la figura, la reversión ocurre por el tiempo limitado que puede ser ajustado en el trimpot P2.
Sin embargo, podemos usar un flipflop como el 4013 para que la reversión sea biestable. Con un pulso en el LDR2 la rotación se invierte. Para que el mismo sufra una inversión, volviendo al modo anterior, debe aplicarse nuevo pulso al LDR, como muestra la figura 7.

El modo de accionamiento sugerido, por medio de haz de luz o infrarrojo, es sólo una sugerencia, ya que fácilmente se pueden desarrollar otros tpos de control externo, como por ejemplo, haciendo uso de señales de radio, vía red hogareña, campo magnético o incluso ultrasonidos.
Pero sin duda una modalidad de accionamiento bastante interesante que puede ser aprovechada en automatismos y robótica es la que corresponde a informaciones que el propio dispositivos capta del medio ambiente, o sea, un sistema de ojos por ejemplo usando los LDRs, o también sensores de contacto (fin de carrera) o aproximación (capacitivos).
Vea el lector que este sencillo circuito abre posibilidades ilimitadas para aplicación en un proyecto de robot.
c) Accionamiento por microcontrolador
Para el accionamiento a partir de un micro precisamos una simple interfase que aparece en la figura 8.

Esta interfase es conectada en la puerta de salida (I/O), y basta recordar que los niveles altos aplicados en las bases de los transistores, corresponden a niveles bajos en las entradas correspondientes del integrado SAA1027, pues en la configuración emisor común, con la saturación del transistor, tenemos una inversión de niveles lógicos.
Los transistores usados pueden ser los BC548 o incluso, para una conmutación más eficiente, los 2N2222.
Para este circuito, el nivel bajo corresponde a una tensión que debe quedar en menos de 1V, y el nivel alto será reconocido si la tensión de entrada fuera superior a 3,5V. Una de las desventajas de este circuito, está en el hecho de que no hay aislación entre el circuito del motor paso a paso y el microcomputador.
Este inconveniente, que puede ser importante en aplicaciones más criticas, es salvado con la utilización de una interfase con acopladores ópticos como el que aparece en la figura 9.

Este mismo circuito también sirve de base para controles de motores paso a paso y el microcomputador. Este inconveniente, que puede ser importante en aplicaciones más críticas, es salvado con la utilización de una interfase con acopladores ópticos (figura 9). Este mismo circuito también sirve de base para controles de motores de paso a partir de circuitos lógicos diversos.
d) Etapas de potencia
Para el accionamiento de motores de paso de mayor potencia, con corrientes superiores a los 500mA, que el integrado puede proveer, tenemos diversas posibilidades. Una de ellas, que permite el control de motores con corrientes de hasta 2 o 3 amperes por fase aparece en la fig. 10.

El transistor TIP32 debe ser montado en un disipador de calor.
Evidentemente, para un motor de 4 fases precisamos 4 transistores en esta configuración, conectados uno a cada salida del integrado.
Con la utilización de los transistores PNP en este circuito el pase dela salida al nivel bajo (LO) hace que el transistor inicialmente en corte pase hacia la saturación energizando así la fase correspondiente del motor.
Una posibilidad interesante, mostrada en la figura 11 consiste en el uso de transistores NPN de potencia pero con la pre-excitación a partir de un PNP.
Con el uso de un 2N3055 podemos controlar un motor (cada fase) de hasta 5 amperes, en las mismas condiciones del circuito anterior. Recordamos que los transistores deben ser montados en buenos disipadores de calor.
Esta aplicación también es válida para algunos tipos de motores que poseen un terminal común positivo para todos los bobinados del motor paso a paso.
Conclusión
El circuito que damos es evidentemente una configuración básica pero puede ser de gran utilidad para los lectores que desean construir su proprio robot o bien dispositivos electromecánicos de precisión como por ejemplo impresora, plotter, etc.
El modo en que se hace el control del motor paso a paso depende de las aplicaciones y para esto existen centenares de posibilidades. Estas posibilidades, en la medida de lo posible, irán apareciendo en forma de proyectos en este sitio.