




Los sensores también son elementos importantes de muchos proyectos que llevan control remoto. Estos sensores pueden ser usados para sustituir uno o más canales de radio control, ayudando así a obtener mayor seguridad en el control de un modelo.
¿Cómo podemos usar sensores en juguetes o modelos radio-controlados?
Muchos lectores tal vez no se hayan detenido a pensar que esto es posible y, sin duda, quedarán encantados al saber que diversos tipos de sensores pueden ayudar a obtener mucho más seguridad en el desempeño de un modelo radio-controlado.
Un sistema sensor puede hasta sustituir diversos canales de un radiocontrol, captando informaciones en el lugar en que este siendo accionado el modelo, y poniendo en marcha controles apropiados sin la interferencia del operador distante.
Vea el lector que un sistema sensor, colocado convenientemente en un aparato radio-controlado, puede funcionar como un copiloto que estará atento a problemas que exigen decisiones rápidas, las cuales no siempre el operador remoto le podrá prestar atención con tanta velocidad.
Podemos dar diversos ejemplos de sensores conectados a sistemas de control y emergencia que pueden ser de gran utilidad:
a) En un aeromodelo, un sensor de temperatura puede detectar un recalentamiento del motor y accionar un limitador de potencia que evitará así el agravamiento del problema.
b) En un barco, un sensor de humedad puede ser usado para accionar una bomba que desagote el agua en caso de entrada de la misma.
c) En un robot o vehículo un sensor de obstáculos puede lograr su detención o reversa del motor en caso de necesidad.
Hasta incluso en el mundo animal existen los sensores. Por si alguno no lo sabe, los bigotes de los gatos funcionan como sensores de obstáculos, o sea, una especie de radar" que presenta una gran sensibilidad al toque con los menores objetos. Caminando en la oscuridad, en condiciones de visibilidad limitada, los bigotes de los gatos los ayudan a "sentir" la presencia de los menores objetos (figura 1)
Pero vamos a la parte práctica. No podemos ensenar al lectores montar un “bigote de gato electrónico” pero sin duda, llegaremos bien cerca de ello, principalmente si el lector pretende un día montar su proprio robot caminante dirigido por control remoto.
a) SENSORES DE SOBRETEMPERATURA Y SUBTEMPERATURA
Estos son sensores que permiten el disparo de un relé cuando la temperatura supera cierto valor o cae por debajo de cierto valor.
El elemento usado como sensor, normalmente, es un NTC (resistor con coeficiente negativo de temperatura), que es un componente cuya resistencia se reduce con el aumento de la temperatura.
El primer circuito, para disparo con elevación de la temperatura, aparece en la figura 2.
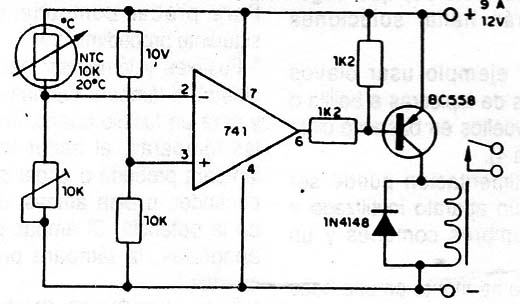
Su base es un amplificador operacional 741 que funciona como comparador de tensión.
El elemento sensor (NTC) forma con un trimpot de ajuste, un divisor de tensión. El ajuste se hace en el trimpot de modo tal que se obtenga en la temperatura de disparo una tensión en la entrada inversora igual a la tensión en la otra entrada.
En la otra entrada, la tensión será del orden de la mitad de la tensión de alimentación, pues el divisor tiene ramas iguales.
Los NTCs comunes pueden operar en temperaturas de hasta 125ºC ó más.
El relé puede ser el Schrack RU 101 006, si la tensión de alimentación fuera de 6 a 9V, y el RU 101 012, si la tensión fuera de 12V 6 más (también pueden usarse relés Metaltex).
En la figura 3 tenemos el circuito para el caso de disparo por subtemperatura. Vea que, en este caso, apenas cambiamos la posición del sensor (NTC) en relación al trimpot, siendo hecho el ajuste del mismo modo.
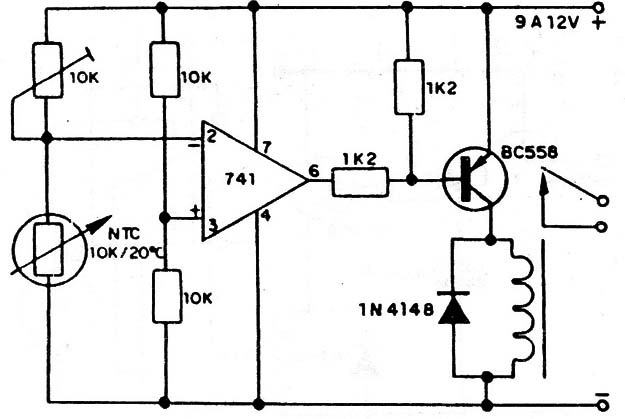
Los transistores usados como excitadores del relé en los dos montajes pueden ser PNP de uso general como los BC558, BC557 ó BC307.
b) SENSORES DE HUMEDAD
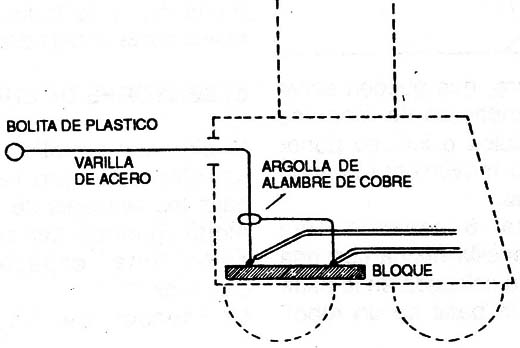
Estos son muy simples, pues constan simplemente de dos barras de metal o incluso trozos de alambres pelados, colocados al alcance del agua.
En la figura 4 tenemos la colocación de los sensores en el fondo de un barco de tele comando, accionando una luz de aviso para que el operador recobre el modelo, ya que se encuentra en peligro de hundirse.
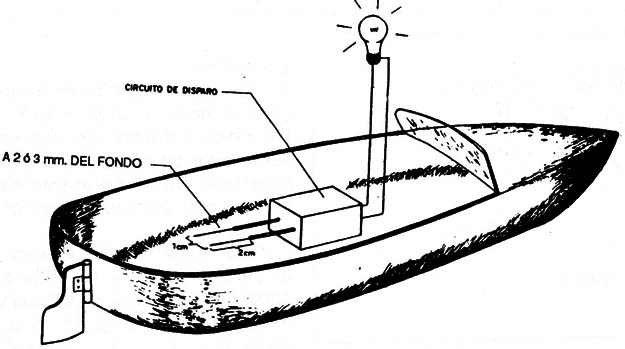
El circuito para accionar esta lámpara usa un SCR y 4 pilas, como muestra la figura 5.
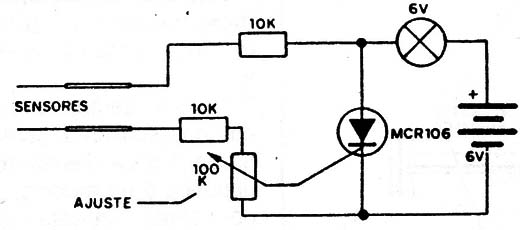
El circuito se rearma desconectando momentáneamente la fuente de alimentación, o sea, las pilas.
c) SENSORES DE OBSTACULOS
Estos son realmente los "bigotes de gato" o antenas, que pueden servir para evitar impactos de modelos contra obstáculos o incluso poner en reversa su movimiento cuando fuera necesario.
En la figura 6 tenemos una sugerencia sencilla hecha con una varilla de acero colocada en la parte delantera de la base de un robot, por ejemplo.
El circuito de accionamiento es sencillo. Aparece en la figura 7.
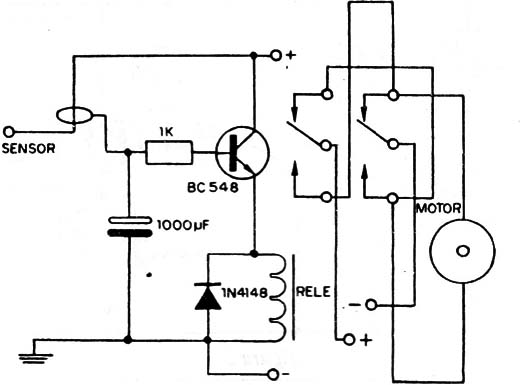
Un único transistor se usa como accionador de un relé que hace la inversión de la polaridad de la batería que alimenta el motor del modelo.
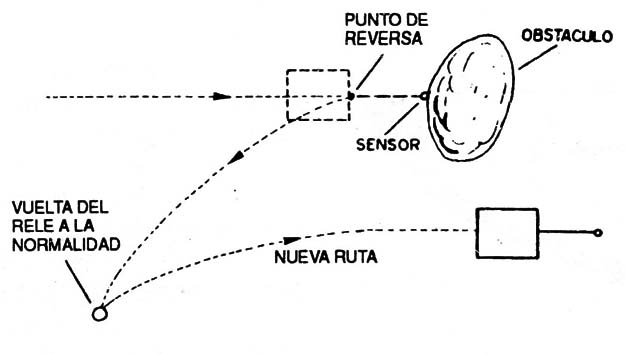
Con un pequeño pulso enviado por el sensor al tocar un objeto, el capacitor se carga y después se descarga lentamente via el transistor. Con eso el relé se mantiene accionando por algunos segundos, pero lo suficiente para hacer que el modelo invierta el movimiento y gire algunos decímetros, como muestra la figura 8.
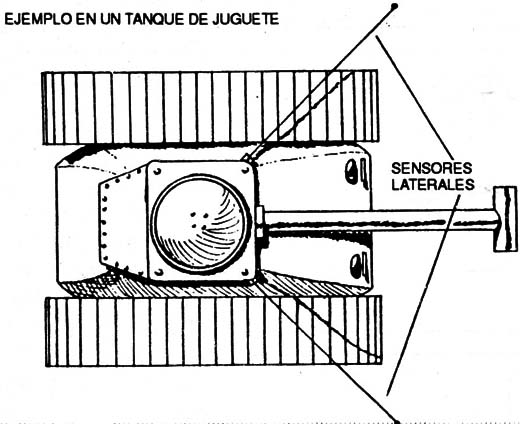
Un circuito semejante se puede usar con dos sensores, como muestra la figura 9 para desviar de obstáculos laterales a un modelo, parcialmente controlado. En este caso, el toque en una de las "antenas" acelera el motor de un lado, haciendo que el modelo cambie ligeramente de dirección, y lo mismo ocurre en relación a la antena del otro lado.
d) SENSORES DE LUZ
Si bien son sencillos de instalar y también de costo relativamente bajo, los sensores de luz de algún modo pueden ser considerados como una especie de ojos electrónicos.
Un sensor de luz, como un fototransistor o un LDR simplemente ve un punto de luz, pudiendo apenas hacer una diferenciación de su intensidad. Por supuesto, el sensor no puede identificar objetos y mucho menos evaluar su distancia.
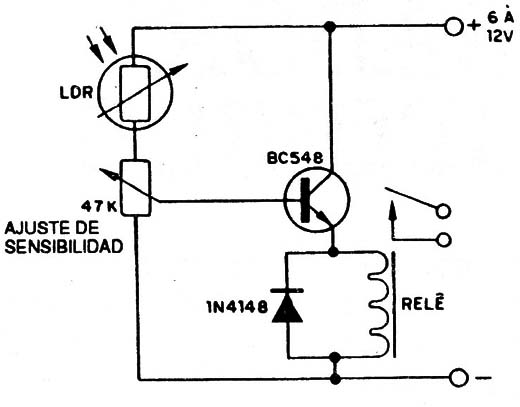
En la figura 10 tenemos un ejemplo de circuito sensor que puede ser ajustado para disparar con un determinado nivel de iluminación.
Colocado en un pequeño modelo, este sensor puede hacer que el mismo revierta su movimiento al acercarse a una fuente de luz o a un objeto de color claro que está bien iluminado.
En la figura 11 damos la sugerencia de un pequeño tanque que, con el circuito indicado, al acercarse a una vela o a una hoja de papel blanco, invierte su movimiento.
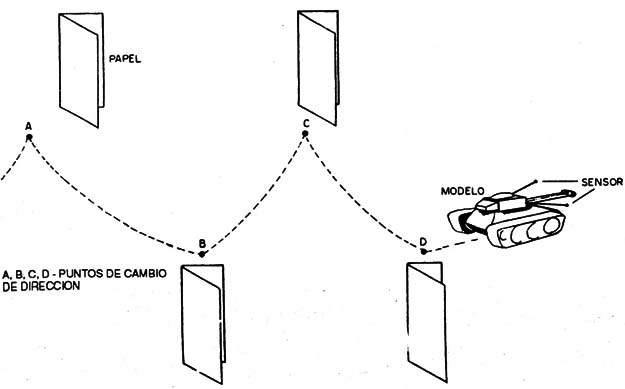
Colocando diversas hojas de papel blanco, en una sala el pequeño vehículo tendrá elementos para desviarse o alejarse de todas ellas.
El efecto podría ser más espectacular si en la punta del "canon" del tanque se colocara un "reflector" (una fuente de luz), metida dentro del tubo para que no la captaran los sensores, de modo que al iluminar el vehículo con su luz a un objeto de color "blanco" inmediatamente se apartara de él.
En este ejemplo de montaje para sensor de luz, es común el LDR, el trimpot hace el ajuste de sensibilidad del sensor, el transistor es del tipo NPN para uso general como el BC237, BC238, BC547 y BC548, y finalmente el relé es del tipo para 6V.
La alimentación del circuito sensor se hará con una tensión de 6V.
Conclusión
Algunos modelos podrán funcionar solos con la ayuda de diversos sensores, "sabiendo" gracias a ellos cómo desviarse de diversos tipos de obstáculos o evitar su aproximación.
En estos casos, la interferencia del controlador podría ser reducida, limitándose apenas a los comandos de accionamiento del motor y eventualmente una alteración de la dirección.
Los sensores también pueden usarse para proteger el modelo en casos de peligro, evitando así su perdida, como el caso del barco con sensor de agua o del avión con sensor de temperatura.