Se trata de un circuito simple para control, a través de un potenciômetro o sensor resistiva, de motores de corriente continua para tensiones entre 6 y 12 V y corriente entre 100 y 1000 mA. El circuito utiliza fuente simétrica y un amplificador operacional 741 como base.
En las aplicaciones en que se desea un control total de un pequeño motor de corriente continua, inclusive con la inversión de movimiento, solamente un control electrónico puede proporcionar los resultados esperados.
EI circuito propuesto puede controlar la tensión sobre un pequeño motor DC en una banda de 0 hasta el máximo y también invertir su rotación con movimiento inverso también graduado entre 0 y el máximo.
EI circuito emplea transistores de potencia de 1A en la excitación siendo éste el límite de corriente de los motores controlados.
El proyecto básico usa fuente simétrica de 6 + 6V siendo pues recomendable para motores de 6V, pero sin alteración. Podemos alimentarlo con tensiones de 9 + 9V ó 12 + 12V y usar motores para estas tensiones.
Dependiendo del tipo de control empleado, el circuito puede tener ganancia ajustable, lo que lo vuelve ideal para innumerables aplicaciones importantes como:
Modelos radio-controlados
Robótica
Control de pequeños ventiladores
Bombas de laboratorios de química y biología
Como funciona
La simple observación del circuito nos permite de inmediato visualizar la operación del sistema. Un amplificador operacional tiene su entrada no inversora (+), que corresponde al pin 3, polarizada con la tensión de referencia de 0 volt de la fuente simétrica.
Así, si la tensión en el pin 2 (entrada inversora) fuera mayor que la tensión de referencia, el amplificador entra en acción y proporciona en su salida una tensión amplificada menor que 0V (tensión de referencia).
El factor de amplificación está dado por la red de alimentación formada por P2 y R4.
Con una tensión menor que 0 V conduce D2 y el motor es alimentado por B2, girando entonces en un sentido.
Si la tensión aplicada a la entrada inversora fuera menor que la referencia, la tensión en la salida del operacional será mayor que 0V y amplificada en una relación que depende del ajuste de P2.
En estas condiciones, conduce Q1 que alimenta el motor a partir de B1. La polaridad de alimentación de B1 es opuesta a la de B2 haciendo que el motor gire en el sentido opuesto.
En nuestro circuito con control potenciométrico, usamos P1 para variar la tensión en la entrada inversora entre un valor menor que la tensión de referencia y un valor mayor cubriendo así toda la banda posible de rotaciones.
P1 puede entonces actuar sobre el motor desde la velocidad máxima en un sentido hasta la velocidad máxima en el otro, pasando por una posición intermedia en que se queda detenido.
En lugar de P1 podemos, en verdad, usar cualquier transductor resistivo como, por ejemplo, un sensor de humedad, un LDR o bien un termistor NTC.
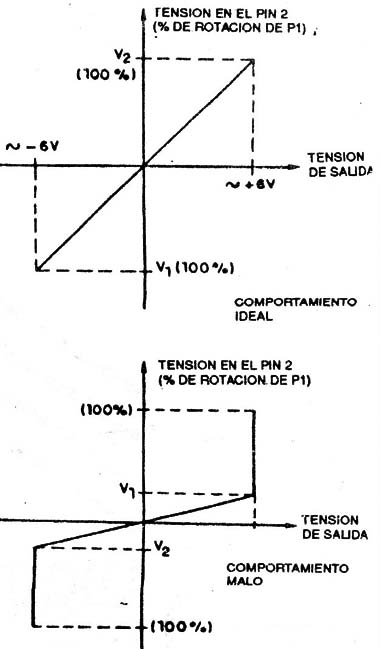
Lo importante para garantizar el funcionamiento es que R2 tenga un valor tal que en el máximo de resistencia del transductor tengamos en 2 del (Jq-1 una tensión menor que 0V (referencia), y en el mínimo de su resistencia, la tensión en el mismo pin del integrado sea mayor que 0V.
El ideal es hacer el dimensionamiento para que la excursión negativa tenga la misma amplitud que la positiva (figura 1).
Para controlar corrientes mayores también es posible alterar el circuito usando transistores más potentes, preferiblemente Darlingtons complementarios.
Montaje
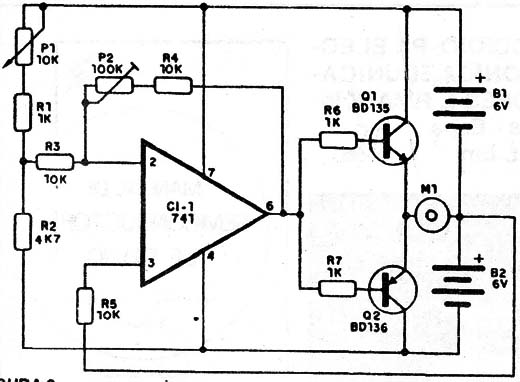
Comenzamos por dar en la figura 2 el diagrama completo del aparato.
La sugerencia de placa del circuito impresa aparece en la figura 3.
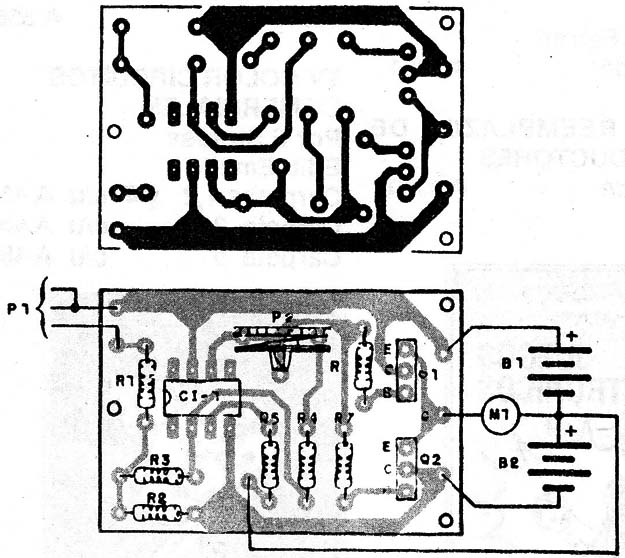
El circuito integrado debe ser montado en zócalo para evitarse problemas de recalentamiento en la soldadura y facilitar su cambio por otro.
Los transistores de potencia deben ser dotados de disipadores de calor. La fuente simétrica debe ser formada por pilas o bien tener la configuración que aparece en la figura 4.
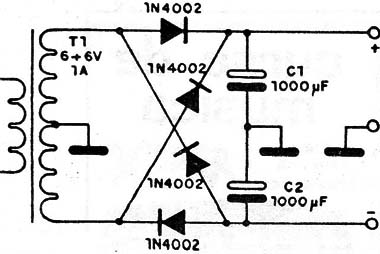
El filtrado debe tener capacitores de 1.000 µF como mínimo, con tensiones de trabajo de 16V.
Los resistores son todos de 1/8 1/4W y P1 es un potenciômetro lineal. P2 es un trimpot que permite ajustar la banda de actuación de P1. El motor sólo puede ser del tipo con imán permanente que admita la inversión de rotación.
Para el caso de sensores, el valor de R2 puede ser alterado. Una sugerencia es usar para R2 provisoriamente un trimpot de 47k a 220 k, conforme e! transductor empleado.
Prueba y uso
Conecte la unidad colocando las pilas en el soporte. Actúe entonces sobre P1 verificando la banda de control y la parada. Vaya al mismo tiempo accionando P2 para obtener el control ideal.
Hecho el ajuste sólo queda usarla unidad, respetando sus limitaciones de corriente.