




Los motores miniatura DC alimentados por pilas o fuentes, y que se encuentran en muchas tipos de juguetes y dispositivos mecánicos, sirven para experimentos imponentes en el área de la robótica. De hecho, estos motores constituyen la mejor forma de obtener propulsión mecánica, pero en compensación, ofrecen algunos problemas de alimentación. Damos entonces, en este artículo, una serie de circuitos prácticos para el control y la alimentación de micromotores DC, que pueden ser de gran utilidad a las lectores interesadas en la robótica y el modelismo.
Los motores DC miniatura, como los usados en juguetes y que sirven para proyectos de robótica, operan con tensiones entre 3 y 12 voltios y sus corrientes de consumo normalmente están situadas entre 50 y 800 mA.
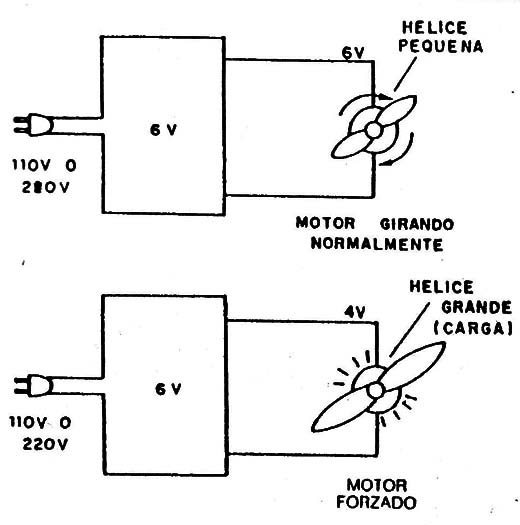
Un problema que encuentran los lectores que desean alimentar estos motores com fuente es el hecho de que el consumo de corriente depende de la carga, o sea, de la fuerza que deba hacer el motor.
Así, mientras que girando libremente, un motor de este tipo puede consumir apenas unos 100 mA, cuando lo cargamos, o simplemente tomamos su eje para simular este hecho, la corriente sube hasta 500 mA e incluso más.
Una fuente mal dimensionada, según muestra la figura 1 , aplicará a este motor la tensión que precisa, digamos 6 voltios, pero esta tensión caerá a valores impropios en cuanto el motor tenga que mover alguna carga mayor.
El ideal para la alimentación de este tipo de motor, cuando no usamos pilas o baterías, es emplear circuitos reguladores electrónicos.
Tenemos entonces dos posibilidades:
Usar un regulador fijo de tensión, que mantenga el valor deseado de tensión en el motor, independientemente de la corriente consumida en una amplia gama de valores; o Usar un regulador ajustable o variable, que nos permita regular manualmente la tensión del motor, y consecuentemente su velocidad, en función de la carga y de la aplicación deseada.
Analizaremos los diversos circuitos posibles, siempre aplicables a motores pequeños, que no exijan corriente de más de 1 ampere (1.000 mA).
Controles fijos
En la figura 2 tenemos un circuito regulador con circuito integrado. El circuito integrado usado, en realidad, recuerda mucho un transistor de potencia, pues posee apenas tres hilos de conexión.
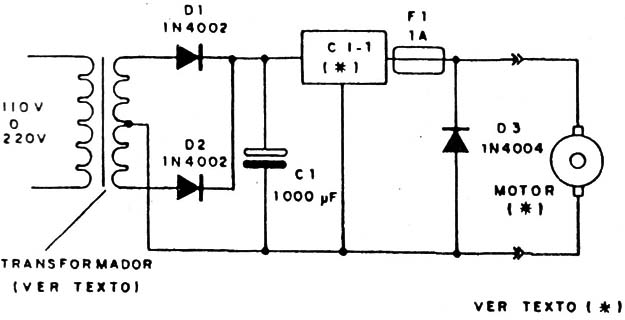
En verdad, este pequeño componente posee muchos componentes internos en una configuración que consigne mantener en la salida la tensión fija, independientemente de la corriente exigida por la carga, hasta 1 A.
El transformador usado debe tener una tensión de salida de acuerdo con el motor. Este “de acuerdo”, en verdad, es aproximadamente 30% a 60% por encima de la tensión, pero con corriente igual o mayor que la máxima exigida o soportada por el CI.
Damos una tablita (1) para que el lector tenga idea de cómo dimensionar el transformador:
| Motor | CI regulador | Transformador |
| 6 V | 7806 | 9 + 9 V o 12 + 12 V x 1 A |
| 12 V | 7812 | 12 + 12 V o 15 + 15 V x 1 A |
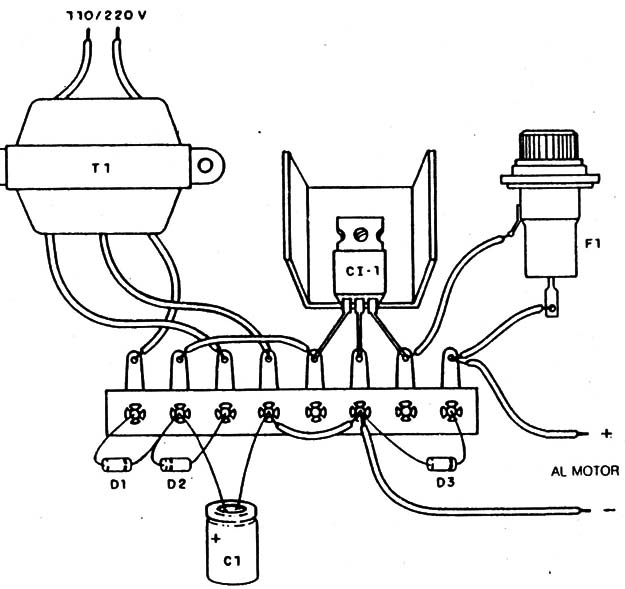
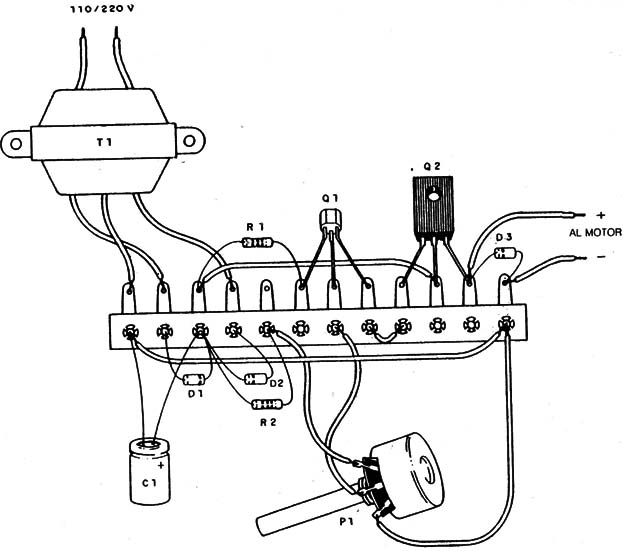
El circuito integrado debe ser montado en un disipador de calor, según muestra la figura 3 que ilustra el montaje en puente del aparato.
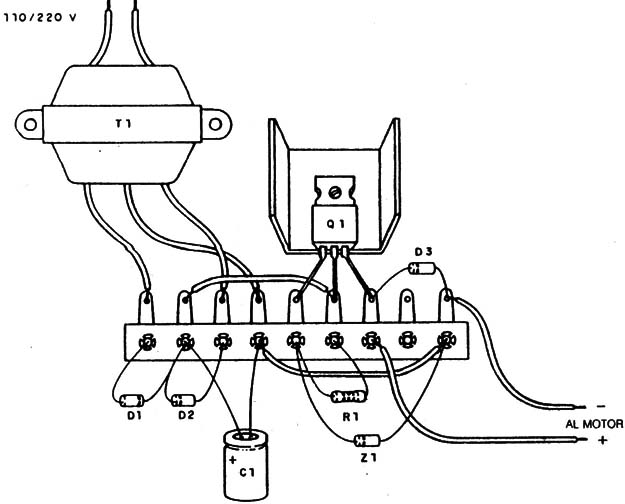
En la figura 4 tenemos un segundo control fijo que sirve para motores de 3 a 12 V con corriente hasta 1 A.
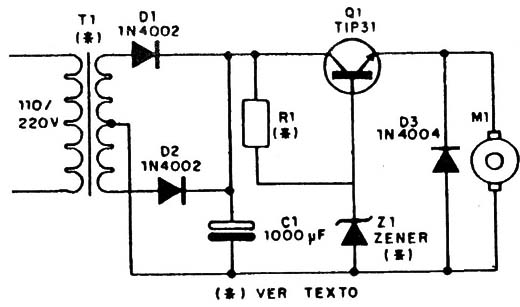
En este circuito, es el diodo zener el que determina la alimentación del motor, o sea, la referencia de tensión.
Tenemos, entonces, la siguiente tabla (2) de valores para os componentes usados:
| Motor | Diodo Zener | R1 | Transformador |
| 6 V | 6,8 V x 400 mW | 100 Ω | 9 + 9 V x 1 A |
| 9 V | 10 V x 400 mW | 220 Ω | 12 + 12 V x 1 A |
| 12 V | 13 V x 1 W | 330 Ω | 15 + 15 V x 1 A |
| 3 V | 3,6 V x 400 mW | 47 Ω | 6 + 6 V x 1 A |
Note que la tensión del diodo zener es un poquito mayor que la leseada en la salida, ya que hay ma caída de aproximadamente 6 voltios en la unión base-emisor del transistor, que deberá ser montado en un disipador de calor.
En la figura 5 tenemos el aspecto del montaje realizado en un puente de terminales aislados.
Controles variables
Comenzamos la serie de circuitos con uno simple, que utiliza apenas un transistor y que mostramos en la figura 6.
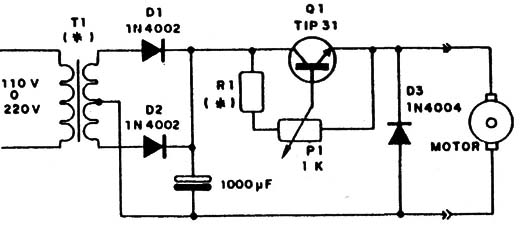
En este circuito, lo que tenemos es simplemente un “reóstato electrónico” o sea, un circuito que funciona como una resistencia variable en serie con el motor, limitando su corriente, y haciendo así que la tensión caiga o se eleve, conforme se desee mayor o menor velocidad.
La tensión máxima que se obtenga será la tensión RMS del secundario del transformador, compensada por la acción del C1 en el filtraje. Así, recomendamos que el transformador tenga las siguientes características de acuerdo con el motor (Tabla 3).
| Motor | Transformador | R1 |
| 3 V | 3 V x 1 A | 82 Ω |
| 6 V | 6 V x 1 A | 150 Ω |
| 9 V | 9 V x 1 A | 220 Ω |
| 12 V | 12 V x 1 A | 330 Ω |
El montaje del aparato se muestra en la figura 7.
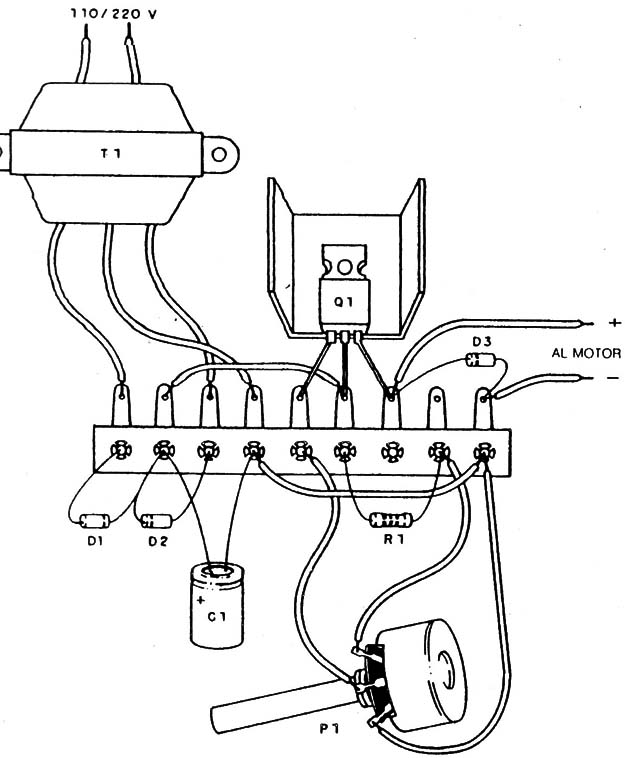
El segundo circuito aparece en la figura 8 y utiliza dos transistores en una configuración Darlington, lo que permite aliviar la corriente de control que circula por el potenciômetro.
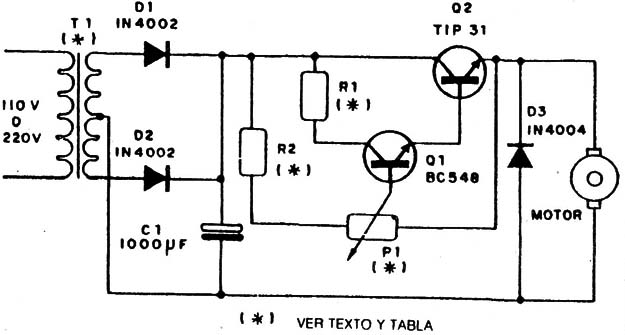
También aquí la tensión máxima aplicada al motor es del mismo orden que la tensión del transformador, valiendo, por lo tanto, la tabla 4 que incluye el valor de R1 y R2.
| Motor | Transformador | R1 | R2 |
| 3 V | 3 V x 1 A | 150 Ω | 4,7 kΩ |
| 6 V | 6 V x 1 A | 220 Ω | 5,6 kΩ |
| 9 V | 9 V x 1 A | 330 Ω | 8,2 kΩ |
| 12 V | 12 V x 1 A | 470 Ω | 10 kΩ |
Los resistores son de 1/4 W o 1/2 W.
Los diodos en paralelo con todos los motores, cuya polaridad debe ser obedecida, tiene por función la protección del transistor controlador, en vista de las tensiones elevadas que pueden aparecer en la conmutación de alta velocidad de las escobillas.
En la figura 9 tenemos el montaje de este control en un puente de terminales.
Conclusiones
Con estos controles el lector tiene dos garantías importantes para sus proyectos: la primera es que su velocidad no sufrirá variaciones acentuadas con las variaciones de la carga, y la segunda es que el motor trabajará dentro de sus especificaciones de tensión, obteniéndose mayor durabilidad.
En los proyectos relacionados con la robótica, la garantía de que se apliquen tensiones correctas es muy importante.
Cómo medir el consumo de un motor
Puede ocurrir que el lector tenga a su disposición un motor de corriente continua, pero no sepa cuál es su corriente máxima, y por lo tanto, tenga dudas de usarlo en algunos de los circuitos propuestos. Un exceso de corriente puede ocasionar desde el quemado del transistor regulador o del transformador, hasta una caída de tensión a valores que impidan su movimiento.
Para medir la corriente de un motor existen varios procedimientos, con mayor o menor precisión dependiendo de la disponibilidad de cada uno.
El primero consiste en el uso de un voltímetro (multímetro), en la escala más baja de tensiones, con una resistencia de 1 ohm x 1 watt, según muestra el circuito de la figura 10.
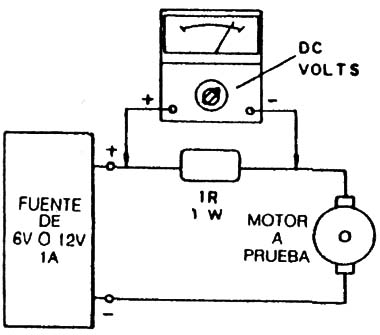
Accionando el motor y tomando su eje de modo de simular a carga máxima, el lector tendrá la indicación de la comente máxima (tome el eje, dejando que el motor haga fuerza, pero no lo deje parar). En este circuito, cada volt marcado corresponde a un ampere.
Así, si lee una tensión de 0,5 volt en el multímetro, al realizar esta prueba, la corriente será de 0,5A o 500 mA, y el motor puede ser conectado a cualquiera de los controles propuestos.
Otra posibilidad consiste en armarse el circuito de la figura 11, utilizando un VU-metro común de 200 µA, esto si no cuenta con un multímetro.
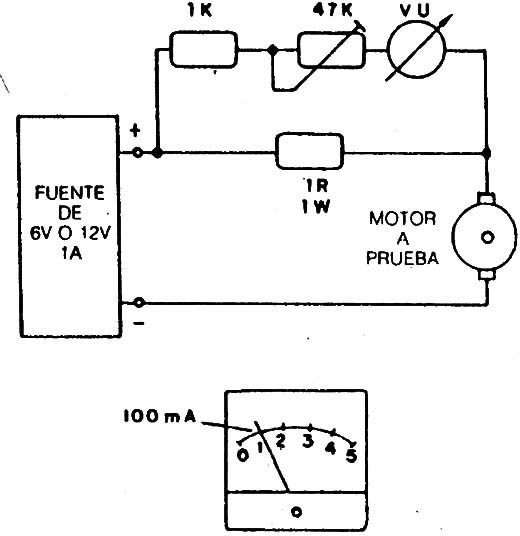
Conecte a la entrada del circuito una fuente de 6 o 12 V y en la salida un resistor de carga. El resistor debe ser de 47 Ω si la fuente es de 6 V y de 100 Ω si la fuente fuera de 12 V, en ambos casos de 1 W.
Ajuste el VU con P1 para que la aguja vaya hasta la primera marca (marcación 1). Ahí tendremos una indicación de 100 mA.
Proyectos de robótica
Evidentemente el simple control de un motor DC no significa un proyecto de robótica completo, pero es una parte muy importante de él. Dependiendo de la finalidad del proyecto existen muchas otras técnicas de control que pueden utilizarse.
Entre ellas podemos citar los controles por pulsos, los controles inversores y muchos otros que deberemos volver a abordar oportunamente, inclusive con proyectos prácticos.
Robots, vehículos teledirigidos, vehículos controlados por cables e distancia, aeromodelos son algunas de las posibilidades que se ofrecen.
