




Este es un montaje dedicado a los interesados por la robótica, los juguetes electrónicos y otras curiosidades, pero que no poseen recursos para la realización de un proyecto muy complicado. Se trata de un minirobot que "ve" obstáculos y objetos luminosos a través de dos fototransistores usados como "ojos". Los fototransistores envían las informaciones al i "minicérebro" del robot que lo guia para buscar los lugares más iluminados.
Vaya entonces este montaje como una especie de iniciación a la robótica: nuestro robot tiene un cerebro, una parte mecánica y una parte sensorial. Es claro que estas partes son mínimas, pero son suficientes para que tenga un comportamiento propio bastante interesante. Así: el sensor está formado por dos fototransistores, que actúan como "ojos" electrónicos, integrando al robot con su medio ambiente (esta relación con el medio ambiente es lo que lo distingue de un mero autómata), ya que "ve" regiones claras y oscuras, distinguiéndolas.
El cerebro es del tipo más simple que puede existir: apenas un bit de capacidad, (inferior al más simple de los seres vivientes, si podemos hacer tal comparación), pero que comanda el sistema mecánico a partir de las informaciones provenientes de los sensores.
Por otro lado, incluso con sólo un bit su comportamiento no es propiamente digital, sino analógico, con una graduación de niveles de estímulos y respuestas que le confiere un comportamiento bastante interesante. Mucho más que una unidad lógica, podemos asociar este "minicerebro" a una unidad biónica.
Finalmente tenemos la parte mecánica, que simplemente le confiere movimiento, y que está formada por dos motores que llevan a nuestro robot a cualquier parte, siempre que sea terreno plano.
El resultado del acoplamiento de todos estos recursos es bastante interesante: tenemos un robot cuyo movimiento depende de la luz y del lugar de donde proviene.
Los estímulos luminosos llevan al robot a buscar las regiones claras. Objetos y obstáculos son percibidos por el robot que los contornea o cambia de dirección al aproximarse.
Para el montaje, tuvimos cuidado de basarnos en materiales que se pueden obtener con facilidad en nuestro mercado, e incluso improvisarse a partir de material de descarte. -Los lectores dotados de imaginación no tendrán dificultades para modificar la parte mecánica según el material que tengan más a mano.
Cómo funciona
El principio es muy simple, como se puede observar por el diagrama de la figura 1.
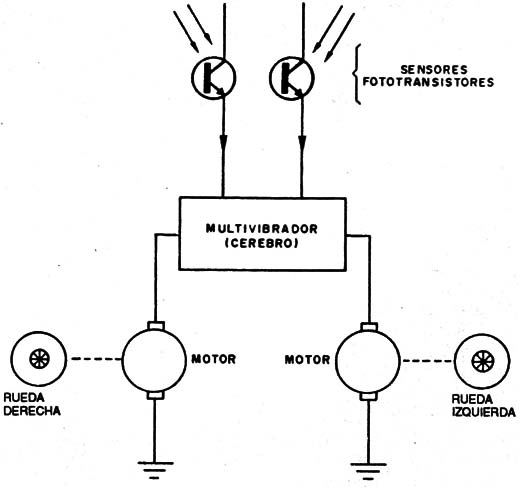
Un multivibrador astable alimenta dos motores comunes.
En el control del tiempo de conducción de cada rama del astable se conectan los sensores, dos fototransistores.
Con igual grado de iluminación, el astable tiene tiempos de conducción por ramas iguales, y con esto los motores giran a la misma velocidad. En estas condiciones el robot avanza en línea recta.
Si uno de los fototransistores es iluminado más que el otro, el astable se desequilibra, y uno de los motores giran más rápido y el otro más lento. El resultado es que el robot tiende a hacer una curva.
Si no hubiera ninguna fuente de luz que equilibre la conducción de los fototransistores, el robot dará una vuelta completa hasta que encuentre una región de igual iluminación que lleve el circuito al equilibrio.
Si encontrara una fuente de luz en esta vuelta, el equilibrio es alcanzado y el robot pasa a mover- se en línea recta en dirección de esa fuente.
Los ajustes de equilibrio con los trimpots llevan al robot al comportamiento deseado.
Dos LEDs conectados a los colectores de los transistores dan también un efecto visual interesante al robot. Estos LEDs guiñan de acuerdo con la luz que el robot ve, en una especia de respuesta luminosa al estímulo externo.
La alimentación del circuito se hace con 6 V provenientes de 4 pilas medianas, y los motores son de juguete para esta tensión, con bajo consumo de corriente.
Montaje
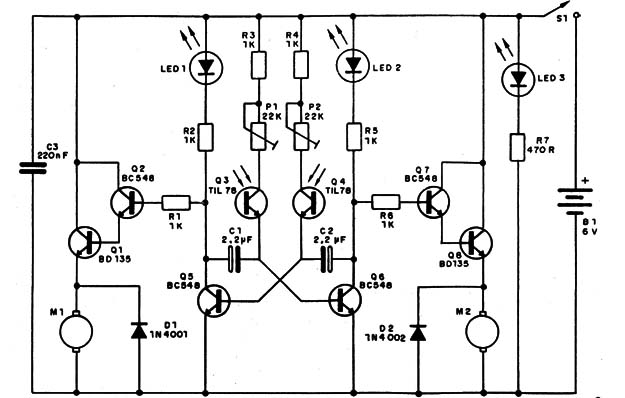
En la figura 2 damos el diagrama completo de la parte electrónica del robot.
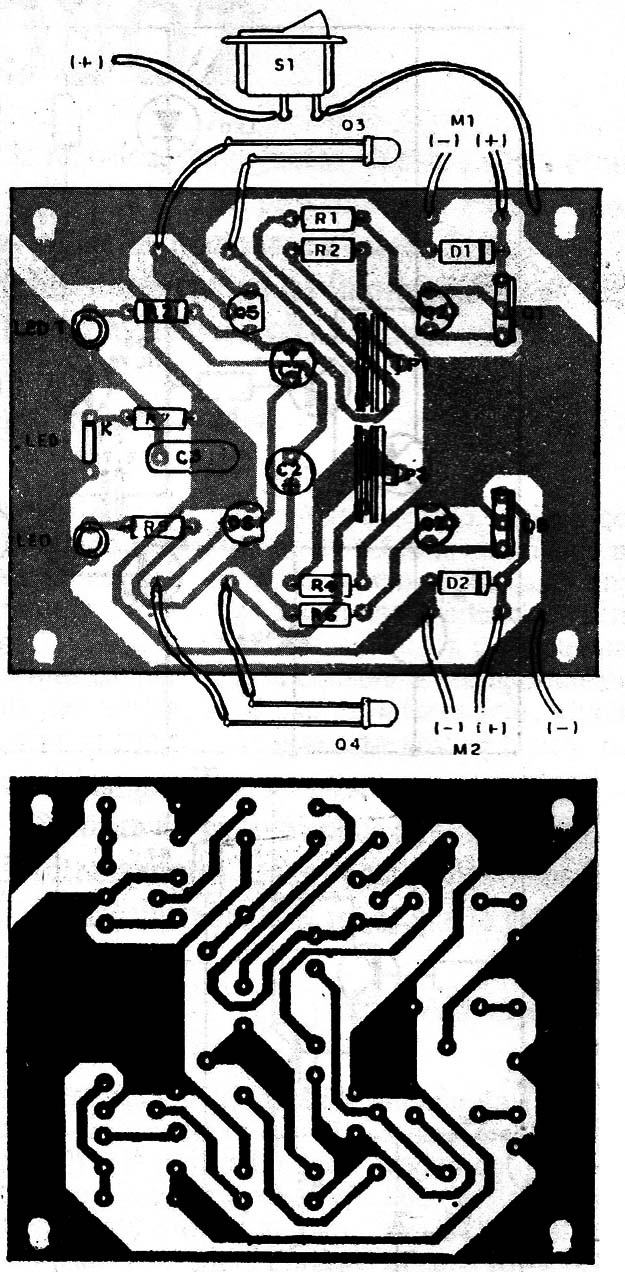
En la figura 3 tenemos una sugerencia de placa de circuito impreso.
Además de los cuidados normales con los componentes, tenemos algunas recomendaciones adicionales.
Los transistores son todos comunes, y los de potencia (BD135) se pueden sustituir por equivalentes. Estos transistores son elegidos en función de la corriente de los motores. Optamos por motores de 6 V de pequeña corriente. Si la corriente del motor fuera elevada pueden ser necesarios disipadores de calor en los transistores, y evidentemente, la duración de las pilas se verá comprometida.
Los resistores son todos de 1/8 ó 1/4 de W y los capacitores electrolíticos deben tener una tensión de trabajo de por lo menos 6 V.
Los lectores que quieran pueden realizar experimentos cambiando el valor de los capacitores para modificar el comportamiento del robot.
Los LEDs son rojos comunes y los fototransistores son del tipo TIL78. Se pueden experimentar equivalentes. Vea que estos fototransistores deben ser montados de tal modo que determinen el campo visual del robot. En la parte mecánica damos los pormenores de su localización.
Los diodos en paralelo con los motores evitan la acción de la alta tensión generada por la conmutación que puede afectar a los transistores.
Para el ajuste existen dos trimpots cuyos valores se pueden situar entre 22 y 47 k.
La parte electrónica puede ser probada antes incluso de tener lista la parte mecánica.
Para eso basta conectar S1 y colocar las pilas en su soporte. Con los fototransistores en la oscuridad, los motores funcionan alternadamente a frecuencias más bajas. Con la iluminación de los dos, la velocidad de cambios y de los guiños pasa a ser mayor.
Oscureciendo un fototransistor e iluminando otro, uno de los motores debe girar más rápido que el otro.
Comprobado el funcionamiento de la parte electrónica, hay que dedicarse a la parte mecánica.
Montaje de la parte mecánica
En la cabeza está ubicada la placa de circuito impreso, además de los LEDs.
En el cuerpo está la fuente de alimentación formada por 4 pilas medianas, en soporte apropiado. En los "pies" se fijan los dos motores.
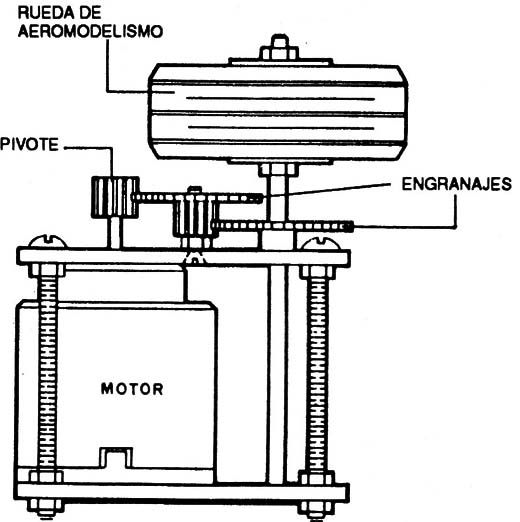
En la figura 4 damos pormenores del acoplamiento del motor a las ruedas propulsoras. Las ruedas indicadas son de aeromodelismo, pero existen diversas posibilidades de improvisación, mas económicas.
Una sugerencia económica para no gastar mucho, con elementos encontrados" o de desecho, aparece en la figura 5.
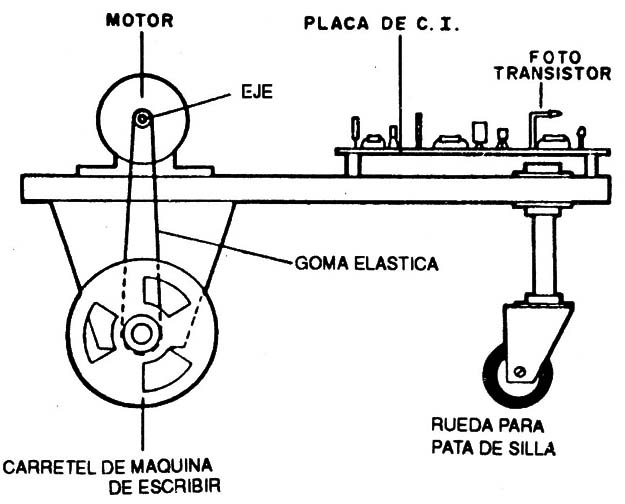
Para ésta usamos tres ruedas, siendo dos propulsoras, conectadas a los motores. La tercera es móvil y "loca", y sirve sólo para dar equilibrio al conjunto. Estas ruedas propulsoras son improvisadas con carreteles de máquina de escribir.
Puede obtener fácilmente estos carreteles en oficinas o de cualquier persona que tenga máquinas de escribir. La transmisión, en lugar de engrenajes, usa gomas anchas de hacer paquetes.
O artículo es de 1989.
Prueba y uso
La prueba final se hace para poner a punto Ia iluminación de los sensores.
Para que el robot vaya en línea recta, los trimpots deben ser ajustados en ausencia de luz.
Tape los fototransistores para hacer este ajuste o bien apúntelos hacia una fuente de luz única
Para usar, basta conectar el robot en un lugar con una fuente de luz bien definida, como un vejador o una veja. Coloque obstáculos y vea cómo se comporta su robot.
Conclusión
Como ven, se trata de un proyecto sencillo, pero con posibilidades de elaboración. Tiene la ventaja de usar motorcitos comunes, bastante económicos. Vaya como una primera propuesta para todos los que desde el comienzo de la revista nos piden "Robótica" o incluso "un robot".
Revisado 2016
