Este circuito por nosotros propuesto es un óptimo controlador para motores DC que puede ser empleado en radio control o en pequeños robots controlados por microcontroladores.
Con este controlador usted podrá controlar fácilmente el giro de un pequeño motor, haciéndolo parar, girar en un sentido o en otro, con dos simples señales de control aplicadas a la entrada del dispositivo.
Debido a la utilización de un circuito integrado CMOS como decodificador, podemos contar con tres características importantes en las aplicaciones de este tipo, que son:
Alta sensibilidad e impedancia de entrada
Alta inmunidad a ruidos
Amplia gama de tensiones de alimentación
Como podemos observar en la figura 1, el control del motor es hecho por cuatro transistores de potencia, constituyendo así una conexión en puente muy interesante pues permite el control del motor en doble sentido sin la necesidad de la utilización de una fuente simétrica.

Los transistores usados ??en este paso pueden ser los BD135 / BD136 para motores de menor consumo (hasta 500 mA) o el par TIP 31 / TIP 32 para motores más pasantes.
En la configuración de Darlington con estos transistores se pueden utilizar cualquier transistor de uso general, como los BC 548 / BC558.
En forma de la lógica de control de la etapa de potencia utilizamos un circuito integrado CMOS tipo 4030 (cuatro puertos EXCLUSIVE OR) siendo que las puertas G1 y G2 del chip funcionan como simples inversores para mantener la polarización simétrica correcta entre los transistores.
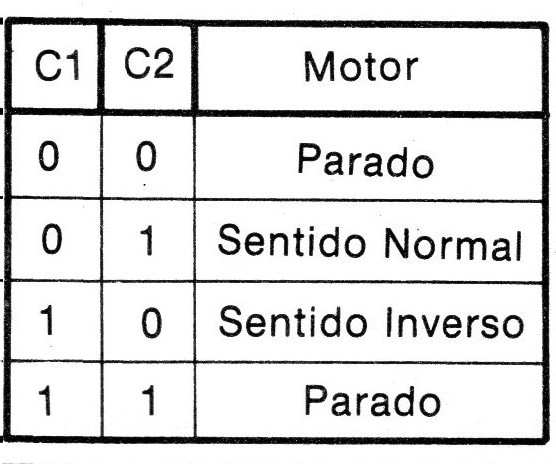
Las puertas G3 y G4 además de aislar la etapa de potencia de la entrada del controlador proporcionando la corriente necesaria para excitación de los transistores constituyen el puente principal de la lógica de control que acciona los motores cuando se aplican las entradas C1 y C2 las señales de control conforme a la tabla siguiente:
Vale la pena notar que las puertas G3 y G4 tienen la función importante de evitar que todos los transistores, por un accidente cualquiera, lleven a conducir al mismo tiempo lo que podría causar la quema de todo el puente.
Las señales de control deben ser compatibles Con los circuitos CMOS, pudiendo venir de una interfase de salida para computadora o de filtros de radio control.
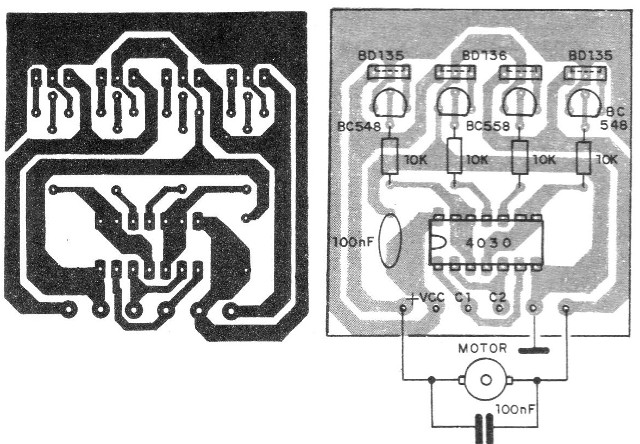
En la figura 2 tenemos el diseño de la placa de circuito impreso así como la disposición de los componentes sobre la misma; por tratarse de un circuito simple por demás, no juzgamos necesario hacer más ningún comentario sobre su realización.