



En otro artículo mostramos que es posible controlar de forma remota diferentes tipos de aplicaciones utilizando el puerto paralelo de una computadora. En él, fue posible obtener 8 líneas de control que podrían usarse para activar los más diversos dispositivos desde un programa. La activación por parte del programa permitiría el uso de un joystick, teclado o incluso un mouse para controlar dispositivos externos. Sin embargo, todavía tenemos otra característica importante para el control de dispositivos de PC que es el puerto serial. De ella precisamente hablaremos en nuestro artículo que cierra la serie.
El puerto paralelo de una computadora, como se vio en el artículo anterior, proporciona 8 líneas de control a las que se puede acceder a través de un conector que se DB-25 encuentra en la parte posterior de cualquier computadora.
Sin embargo, el uso del puerto paralelo en algunas aplicaciones tiene algunas desventajas. Uno de ellos es la necesidad de tener que emplear tantas líneas de señal como dispositivos hay que controlar. Así, si vamos a controlar una interfaz con 8 relés, necesitamos al menos 9 hilos, como se muestra en la figura 1: 8 para las señales y uno para el retorno.
El puerto paralelo también tiene la desventaja de que las señales no se pueden enviar muy lejos, un máximo de 3 metros, ya que la línea paralela que las transporta está sujeta a interferencias, atenuación y ruido. La interfaz del objeto controlado no puede estar lejos de la computadora, como se muestra en la figura 2.
Otra desventaja es el alto costo de un cable largo multiconductor (cable de impresora) y el hecho de que no es muy flexible ni liviano, lo que permite tan pronto como el objeto controlado, si es móvil, tenga una buena libertad de movimiento.
Una solución mucho mejor para controlar dispositivos externos de forma remota utilizando la PC es la que hace uso del puerto serie.
El Puerto Serial
En lugar de enviar los comandos por separado cada uno por un hilo, lo que podemos hacer es poner en cola estos comandos y enviarlos secuencialmente a través de un solo par de conductores, como se muestra en la figura 3.

En estas condiciones decimos que los datos o las señales se envían en serio, lo que requiere tanto un circuito especial para la transmisión como un circuito especial para la recepción.
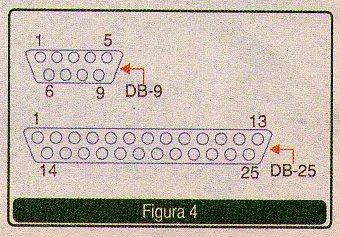
Las computadoras ya tienen estos circuitos y, por lo tanto, tienen un puerto serie que puede enviar datos de esta manera o recibirlos. El puerto serial de una computadora puede usar un conector DB-9 de 9 pinos o un conector DB-25 de 25 pinos con las disposiciones que se muestran en la figura 4.
Los puertos serial de una computadora se denominan comúnmente COM1 y COM2.
A pesar de la ventaja de utilizar solo dos hilos y también de permitir el uso de cables muy largos, lo que da más movilidad a los dispositivos controlados, especialmente si son móviles, el sistema de envío de señales de control a través del puerto serial tiene algunas desventajas:
• La velocidad de transmisión de las señales no es tan alta como la que podemos lograr con el puerto paralelo.
• El circuito para recibir las señales es más complejo de lo que necesitamos para recibir señales del puerto paralelo.
Pero aún hay otros puntos positivos a considerar: las señales de un puerto serial se pueden transmitir fácilmente de forma inalámbrica utilizando transmisores de RF o enlaces de infrarrojos, lo que las señales del puerto paralelo no pueden.
Veamos cómo se puede utilizar todo esto para utilizar el puerto serial en el desarrollo de proyectos de control remoto.
Las Señales
En el puerto paralelo tenemos señales que corresponden a cero volts para el nivel 0 y 5V para el nivel 1.
El puerto serial funciona con señales que siguen un estándar internacional llamado RS-232, de ahí que también llamemos al puerto serie RS-232 puerto. De acuerdo con este patrón, las señales deben variar entre dos valores bien definidos de tensiones positivas y negativas, como se muestra en la figura 5.
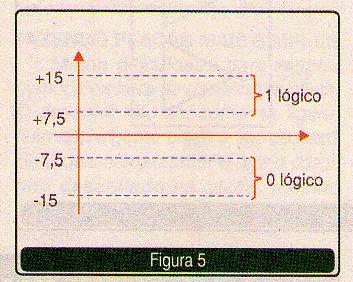
Así, teniendo en cuenta que en el transcurso de una línea larga, la señal puede atenuarse (disminuir en intensidad) se espera que el circuito receptor esté proyectado para operar dentro de una cierta banda de valores que le permita reconocer niveles lógicos.
La configuración normal de una interfaz RS-232, o un sistema de comunicaciones por el puerto serie usa 9 señales, pero un solo control remoto, puede usar solo tres líneas de información, como se muestra en la figura 6.
Por lo tanto, en la práctica, hay circuitos que convierten las señales recibidas de modo que puedan ser lo suficientemente fuertes como para impulsar un circuito decodificador.
El circuito decodificador es el UART o Universal Asynchronous Receiver/Transmiter que tiene los bloques que se muestran en la figura 7.
El propósito del UART es devolver las señales que llegan en serie a su forma paralela para que puedan ser procesadas por los circuitos que conducirán las cargas en un sistema de control remoto.
Hay varios UARTs y controladores que son muy comunes en proyectos que involucran comunicación en serie y que se pueden usar en un sistema de control remoto.
Tenga en cuenta que estos circuitos se pueden conectar directamente a transceptores que, en lugar de una línea física entre las estaciones de comando y el objeto comandado, pueden emplear señales de radio o infrarrojos (IR), lo que da como resultado un sistema con la estructura que se muestra en la figura 8.
Muchos microprocesadores y microcontroladores como los PICs, 80C51, MSP430, COP8 que se pueden utilizar para procesar funciones complejas en un sistema mediante control remoto, tiene entradas compatibles con la interfaz RS-232.
Un ejemplo de esto lo da el Basic Stamp, el cual puede ser programado por una entrada Serial desde una PC para poder controlar un robot, como se muestra en la figura 9.
Como podemos ver, este módulo que puede ser programado por RS-232, tiene un módem interno capaz de interpretar sus señales. De esta manera, podemos utilizar dicho dispositivo para controlar de forma remota un robot u otro vehículo.
Para trabajar con circuitos digitales a partir de las señales de un puerto serie, primero es necesario convertir las señales que varían entre -7.5 V/-15 V a + 7.5/+ 15V en señales TTL o CMOS. Un circuito muy utilizado para este propósito es el MAX232 que tiene el pinaje que se muestra en la figura 10.
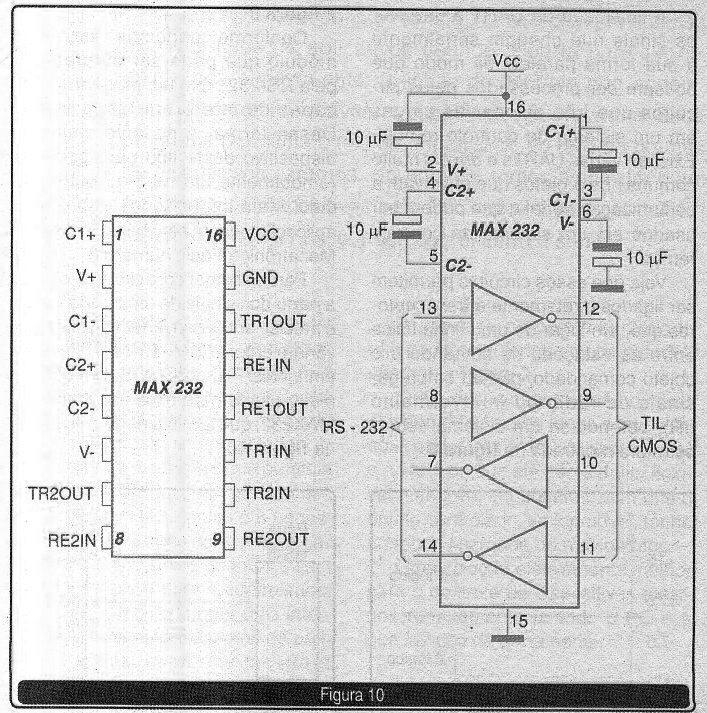
Este dispositivo también realiza la operación inversa gracias a una “charge pump”, bomba de carga que logra aumentar la tensión de 5 V de un circuito TTL a +/-10 V.
Para que podamos recuperar las señales de serie a paralelo y viceversa, es necesario utilizar un UART. Uno de los más comunes es el 16550 que tiene el pinaje que se muestra en la figura 11.
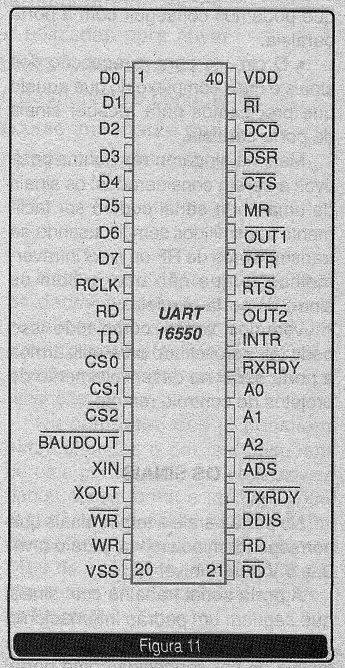
Note que este UART tiene un bus de datos en el que podemos aplicar tanto los datos en paralelo que deben transmitirse en forma serial como eliminar los datos en paralelo, recibidos en la forma de serial.
Conclusión
Trabajar con señales en forma serial es un poco más complejo en forma paralela, aunque hay circuitos integrados que pueden hacer la conversión. Sin embargo, este es el formulario que utilizan normalmente los módems.
Cuando hablamos de módems, no es solo del tipo que se usa para acceder a Internet. Se debe utilizar un módem siempre que desee enviar datos digitales en serie, a través de fibras ópticas, líneas telefónicas, líneas eléctricas, rayos infrarrojos o incluso señales de radio.
Los lectores interesados en profundizar en el uso de la tecnología digital en el control remoto o el envío de datos a distancia pueden encontrar mucha información avanzada en los libros, ya que este artículo es un paso por encima de lo que pretendemos mostrar en nuestra sección de control remoto.
