



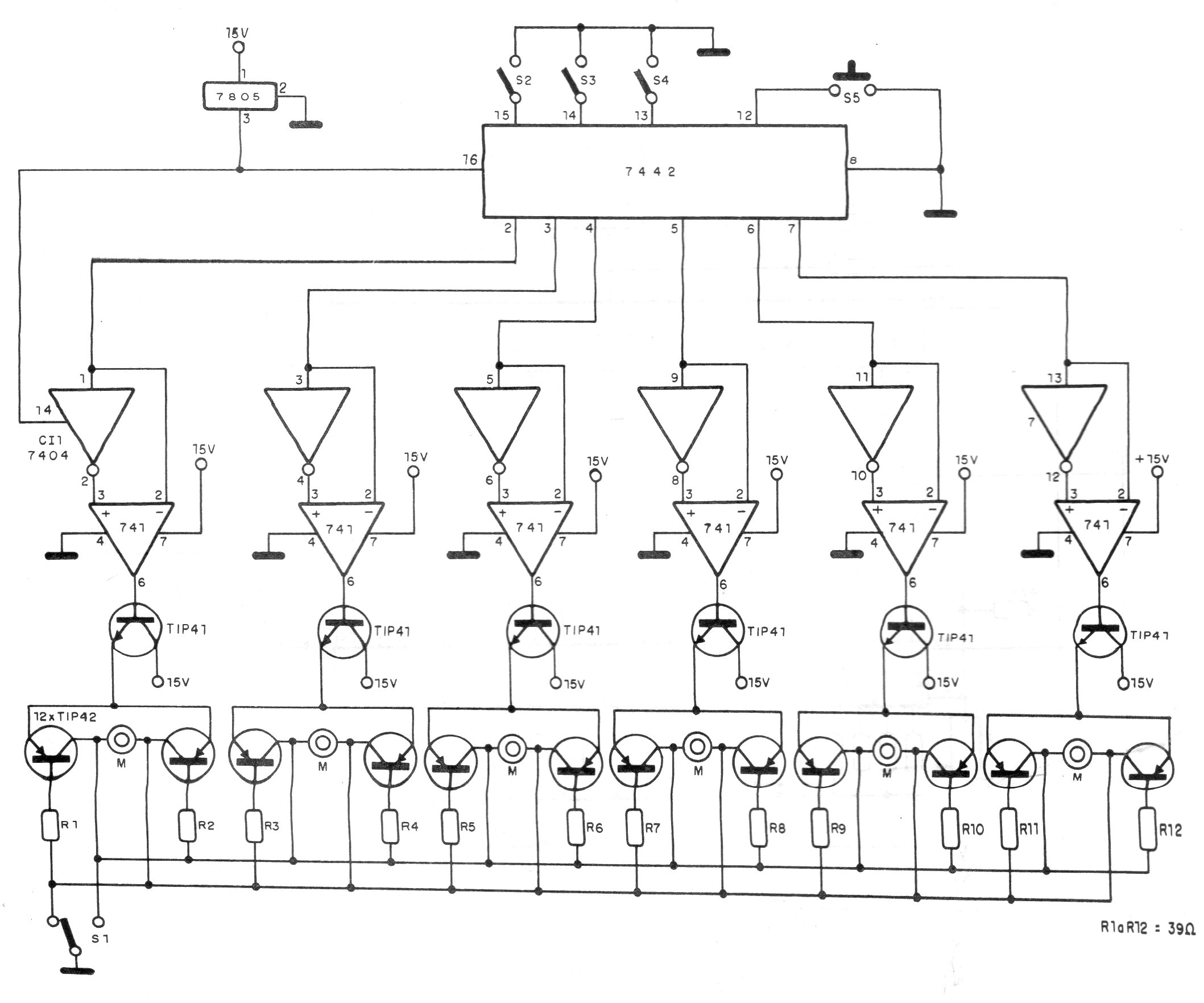
Este circuito es de una documentación de 1994. Es un control para diversos motores de corriente continua que forman parte de un brazo robótico o mecánico. El circuito puede también funcionar como escudo siendo controlado por un microcontrolador. La tensión de alimentación es de 5 V porque el circuito utiliza componentes TTL.
| Haga click en la imagen para ampliar |
