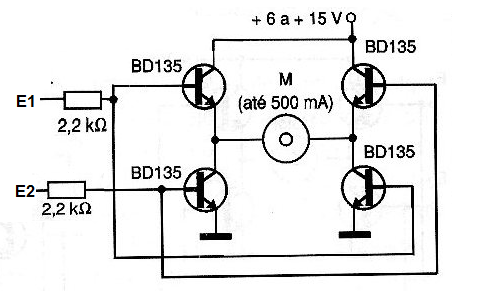
La dirección de rotación del motor puede ser controlada por un Arduino u otro microcontrolador a través de este puente H. Los niveles 00 mantiene el motor parado mientras 01 y 10 determinan la rotación en ambas direcciones posible. La salida 11 está prohibida porque causa la conducción de todos transistores a la vez, haciendo que el circuito tenga un corto circuito. Las salidas se pueden modular para obtener el control PWM de velocidad en la dirección deseada.