




ón Por Anchura de Pulso. Lo que se hace en este circuito es aplicar pulsos de corriente en el motor de que la potencia total depende de la duración de esas muñecas. Así, si las muñecas son cortas y bien espaciadas la potencia es pequeña y el motor gira despacio. Si la duración del pulso aumenta, aumenta la potencia y el motor gira más rápido. La ventaja de este sistema es que, como los pulsos tienen intensidad constante (sólo la duración cambia) el torque del motor se mantiene y se logra ajustar la velocidad en valores muy bajo lo que no es posible en los circuitos que usan reóstatos. El circuito mostrado en la figura es entonces un oscilador que produce pulsos cuya duración puede ser ajustada en un potenciómetro. Aplicando los pulsos a un transistor de potencia él consigue controlar un motor de manera bastante eficiente. Los circuitos de este tipo son especialmente recomendados para los controles de precisión en los que se necesitan bajas revoluciones sin la pérdida de torque como, por ejemplo, en brazos de robots. El transistor utilizado puede ser cualquier PNP de potencia con al menos 1 ampère de corriente de colector y debe ser montado en un radiador de calor, conforme el motor controlado. El valor del capacitor C2 debe ser elegido según el tipo de motor de modo que no ocurran oscilaciones o "soquitos" en el funcionamiento. El propio montador debe hacer experimentos con diversos valores de este componente hasta obtener lo que dé un mejor desempeño.
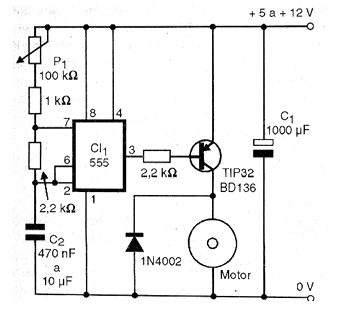
Control PWM (CIR1450S)
PWM es la abreviatura de Pulse Width Modulation o Modulación Por Anchura de Pulso. Lo que se hace en este circuito es aplicar pulsos de corriente en el motor de que la potencia total depende de la duración de esas muñecas. Así, si las muñecas son cortas y bien espaciadas la potencia es pequeña y el motor gira despacio. Si la duración del pulso aumenta, aumenta la potencia y el motor gira más rápido. La ventaja de este sistema es que, como los pulsos tienen intensidad constante (sólo la duración cambia) el torque del motor se mantiene y se logra ajustar la velocidad en valores muy bajo lo que no es posible en los circuitos que usan reóstatos. El circuito mostrado en la figura es entonces un oscilador que produce pulsos cuya duración puede ser ajustada en un potenciómetro. Aplicando los pulsos a un transistor de potencia él consigue controlar un motor de manera bastante eficiente. Los circuitos de este tipo son especialmente recomendados para los controles de precisión en los que se necesitan bajas revoluciones sin la pérdida de torque como, por ejemplo, en brazos de robots. El transistor utilizado puede ser cualquier PNP de potencia con al menos 1 ampère de corriente de colector y debe ser montado en un radiador de calor, conforme el motor controlado. El valor del capacitor C2 debe ser elegido según el tipo de motor de modo que no ocurran oscilaciones o "soquitos" en el funcionamiento. El propio montador debe hacer experimentos con diversos valores de este componente hasta obtener lo que dé un mejor desempeño.
